Radiologia Brasileira - Publicação Científica Oficial do Colégio Brasileiro de Radiologia
AMB - Associação Médica Brasileira CNA - Comissão Nacional de Acreditação
 Vol. 49 nº 2 - Mar. / Abr. of 2016
Vol. 49 nº 2 - Mar. / Abr. of 2016
|
ARTIGO ORIGINAL
|
|
|
|
|
Autho(rs): Taynná Vernalha Rocha Almeida1; Arno Lotar Cordova Junior2; Pedro Argolo Piedade3; Cintia Mara da Silva4; Priscila Marins5; Cristiane Maria Almeida2; Gabriela R. Baseggio Brincas6; Danyel Scheidegger Soboll7 |
|
|
Descritores: Radiocirurgia craniana frame; Radiocirurgia craniana frameless; IGRT; Erros de posicionamento; Erros residuais; Objeto simulador antropomórfico. |
|
|
Resumo: INTRODUÇÃO
A literatura atual sugere que a radiocirurgia (RC) craniana, uma técnica radioterápica com alta precisão no tratamento de lesões benignas e malignas, apresenta a mesma eficácia da cirurgia invasiva no controle de tumores com até 3 cm de tamanho(1). Tradicionalmente, esta técnica requer o uso de um arco craniano com fixação óssea devidamente posicionado por um neurocirurgião após anestesia local(2). A essa modalidade radiocirúrgica dá-se o nome, em inglês, de frame-based radiosurgery, ou apenas RC frame. Por ser um sistema bem estabelecido na literatura e apresentar mínima possibilidade de movimentação craniana, a RC frame é considerada o padrão ouro das RCs(3). O desenvolvimento de novos métodos radioterápicos, incluindo os guiados por imagem (image-guided radiotherapy - IGRT), possibilitou o advento de um sistema de imobilização estereotáxico não invasivo: a RC frameless. Neste sistema, um conjunto de máscaras termoplásticas moldam a superfície craniana do paciente(4). Os desvios de posicionamento entre o planejamento e a execução do tratamento caracterizam os erros de posicionamento setup de um software de IGRT. O sistema identifica esses erros e, a partir da correção deles, possibilita uma redução dos valores, resultando em um erro remanescente dentro de um limite aceitável, chamado erro residual. O desempenho, a precisão e a acurácia com que os equipamentos que compõem um sistema radioterápico entregam a dose de radiação à lesão previamente detectada dependem diretamente dos resultados dos testes de controle de qualidade desses equipamentos(5). Esses testes usualmente necessitam de objetos simuladores adequados para que possam ser realizados com sucesso. De modo a ampliar as informações já existentes na literatura sobre a precisão dos diferentes métodos de imobilização para uma RC, pretende-se, neste estudo, comparar os erros de posicionamento setup e residuais translacionais tridimensionais (3D) de uma RC guiada por imagem, realizada tanto pelo método frame quanto pelo frameless, por meio do teste end-to-end, com uso de um objeto simulador antropomórfico Alderson Radiation Therapy (ART)-210. MATERIAIS E MÉTODOS Sistema ExacTrac 5.5 X-ray 6D de RC estereotáxica intracraniana Por meio do rastreamento óptico de esferas reflexivas e registro de raios X, o sistema ExacTrac (Brainlab AG; Feldkirchen, Alemanha) é capaz de determinar e corrigir o posicionamento do paciente em tempo real. Esse sistema possui uma câmera emissora e receptora de infravermelho, com a qual é possível o rastreamento óptico, e tubos de raios X com kV de energia, com dupla montagem e detectores de silício, os quais geram imagens ortogonais e criam fusões entre imagens de raios X e imagens de tomografia computadorizada (TC) de planejamento, realizadas por reconstrução digital radiográfica(6). Testes para calibração e controle de qualidade do sistema Para aumentar a precisão tanto da câmera de infravermelho quanto dos tubos de raios X, o isocentro do ExacTrac deve ser diariamente calibrado e verificado. Dessa maneira, assegura-se o alinhamento adequado do isocentro do sistema ao isocentro de radiação do acelerador linear. Para tanto é utilizado um phantom especial (phantom de isocentro ET) de 10 × 10 cm2 de tamanho, com cinco esferas reflexivas fixadas em sua superfície superior(6). Para a calibração dos raios X, outro phantom especial deve ser utilizado. Este, por sua vez, assegura a precisão das correções e verificações de posicionamento durante o tratamento. Ambos os testes foram realizados neste estudo de forma a adotar desvios residuais de no máximo 1 mm, em módulo, conforme recomendado pelo fabricante. A verificação do posicionamento do isocentro de calibração dos raios X em relação ao isocentro mecânico do acelerador linear é realizada por meio do phantom Winston-Lutz. Esse phantom possui uma pequena esfera metálica composta de aço, titânio ou tungstênio, inserida na extremidade de uma haste de mesmo material, a qual representa o alvo de tratamento. A diferença entre o centro da esfera, sua projeção e o centro do campo de tratamento revela o movimento do isocentro, que deve ser igual ou menor que 0,7 mm para os tratamentos de estereotaxia(6). ART-210 e teste hidden target O teste hidden target, ou esfera oculta, possibilita a avaliação da acurácia do sistema para as RCs, sejam elas frame ou frameless. Para este teste, um phantom craniano deve ser utilizado(6). No interior deste phantom, esferas metálicas deverão ser inseridas para simular possíveis lesões. Dessa forma, é possível analisar a precisão com que as esferas são detectadas. Como resultado, pode-se obter os erros de posicionamento setup e residuais (após as devidas correções) do sistema em questão. Para este estudo, um objeto simulador antropomórfico modelo ART-210 foi utilizado. Este phantom é composto por uretano com número atômico efetivo e densidade de massa similares aos de um tecido muscular, adiposo e ósseo próprios de cada região, apresentando secções transversais com 2,5 cm de espessura. Quatro esferas metálicas de 5 mm de diâmetro cada foram inseridas no interior de quatro diferentes cortes transversais do phantom, de modo a simular lesões cerebrais. A primeira foi inserida no interior do lobo frontoparietal, a segunda, no lobo frontal, a terceira, no lobo temporo-occipital, e a quarta, na base do crânio (Figura 1). 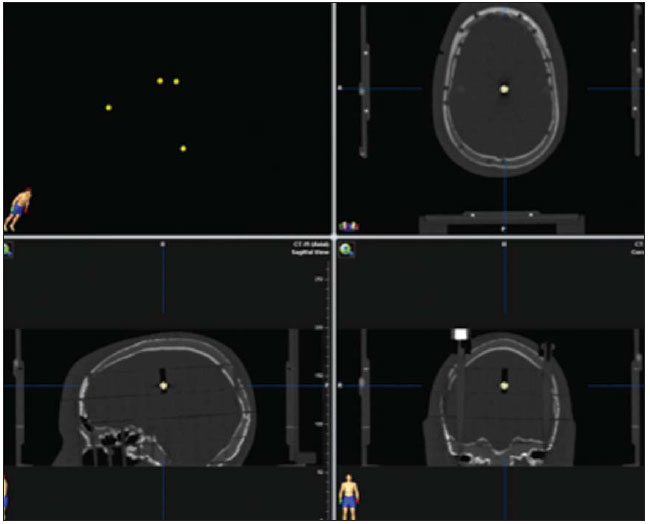 Figura 1. Imagens tomográficas de crânio do objeto simulador antropomórfico ART-210 juntamente com as quatro esferas metálicas em destaque. Para ambos os métodos foram utilizadas as mesmas ferramentas de um procedimento real. Para evitar movimentação entre as fatias do phantom, faixas adesivas foram utilizadas em toda a extensão do crânio simulador. Imagens de TC com 0,625 mm de espessura foram realizadas com o phantom devidamente posicionado para a RC frameless e, subsequentemente, para a RC frame, em mesa reta e com sistema de lasers apropriado. RC frameless Para a RC frameless, um sistema de máscaras termoplásticas (Brainlab AG; Feldkirchen, Alemanha) moldou a superfície craniana do phantom. Para tanto, todas as partes do sistema foram previamente banhadas em água a aproximadamente 70º C por cerca de 5 minutos, de acordo com as recomendações do fabricante. Para a formação do molde, o crânio antropomórfico foi devidamente posicionado sobre uma base de apoio especial com rotação nula. Cada molde foi colocado individualmente, mantendo-se sobre o crânio cerca de 30 minutos, até que a superfície plástica transparente se tornasse opaca e totalmente seca (Figura 2). 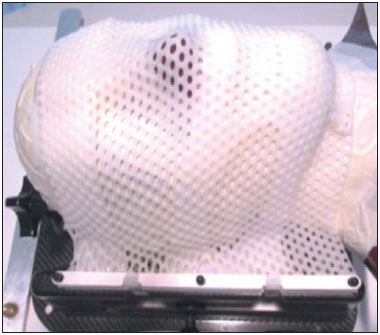 Figura 2. Crânio do ART-210 devidamente posicionado na base de apoio, com o conjunto de máscaras frameless moldadas adequadamente à superfície craniana do phantom em questão. Durante as imagens para planejamento, uma caixa localizadora de acrílico foi acoplada à base de apoio do sistema frameless. Fiduciais inseridas na caixa permitiram a correlação das estruturas cranianas do phantom com as coordenadas dos dados importados no sistema iPlan RT(6). RC frame Para a RC frame foi utilizado o halo craniano (Brainlab AG; Feldkirchen, Alemanha) devidamente fixado em posição supina, sem rotação do crânio. A angulação do halo em relação à linha interorbital foi 0º a 10º. Uma caixa localizadora de 210 mm de comprimento foi acoplada ao halo craniano durante a realização das imagens (Figura 3). Esta ferramenta definiu com precisão estereotáxica as coordenadas 3D do volume craniano e determinou a posição exata da matriz geométrica das estruturas em questão(6). 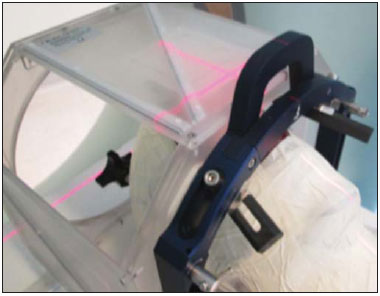 Figura 3. Execução das imagens de TC do crânio do ART-210 devidamente posicionado na base de apoio com o conjunto de aparatos para a RC frame. Verificação ExacTrac Após os devidos testes de controle de qualidade já descritos, foi realizado o registro das imagens de TC para a RC frame e RC frameless no programa de tratamento. Um leitor de infravermelho faz a identificação das esferas reflexivas acopladas a um aparato fixado na mesa de tratamento. A localização das esferas é correlacionada geometricamente ao isocentro indicado pela TC de planejamento. Usualmente, o sistema ExacTrac não é utilizado para RC frame. Para a análise dos erros de posicionamento identificados por este sistema, houve a necessidade de utilizar uma técnica alternativa para o posicionamento do aparato com as esferas reflexivas, de modo a fixá-las ao halo estereotáxico e, dessa forma, permitir as correções e verificações. O sistema ExacTrac possibilita estabelecer uma tolerância máxima relativa ao erro residual resultante de cada movimentação de mesa ou mudança de isocentro de tratamento(6). A tolerância utilizada para este estudo foi 1 mm, em módulo. As análises dos erros foram realizadas sempre com mesa e gantry a 0º, tanto para frame quanto para frameless. RESULTADOS Foram coletadas informações dos erros setup e erros residuais de cada isocentro nas três direções translacionais: lateral, longitudinal e vertical. As Figuras 4 e 5 mostram os resultados encontrados para cada isocentro em cada direção translacional, em módulo. 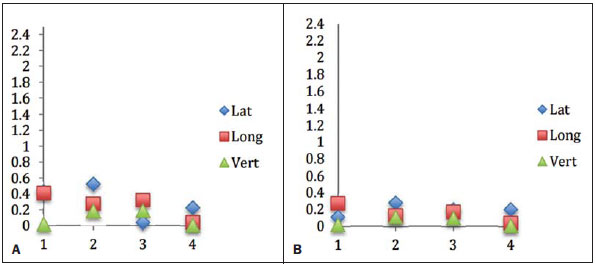 Figura 4. Resultado dos erros da RC frameless para os quatro isocentros previamente criados, nas três direções translacionais. Coordenada x referente aos quatro isocentros em questão, e coordenada y, os valores resultantes dos erros, em milímetros. A: Erros setup. B: Erros residuais. 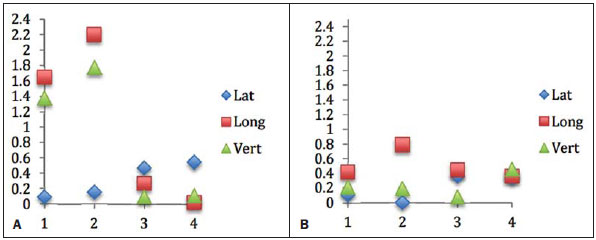 Figura 5. Resultado dos erros da RC frame para os quatro isocentros previamente criados, nas três direções translacionais. Coordenada x referente aos quatro isocentros em questão, e coordenada y, os valores resultantes dos erros, em milímetros. A: Erros setup. B: Erros residuais. A Figura 6 apresenta as médias, em módulo, relativas aos erros setup e residuais translacionais considerando as três direções de forma única, para cada método de RC, por isocentro de tratamento. 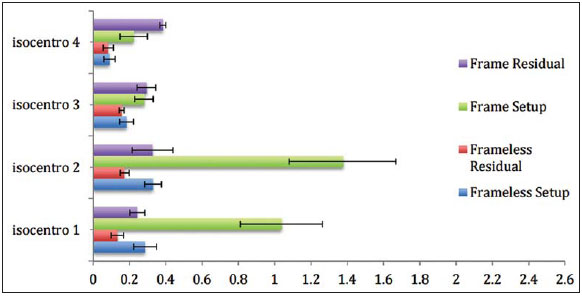 Figura 6. Resultado da média dos erros de posicionamento translacionais 3D RC frame e RC frameless para os quatro isocentros separadamente. Coordenada x referente aos valores resultantes, e coordenada y, isocentros em questão. Barra de erros mostrando o desviopadrão da média de cada grupo de resultados. Para o método frameless, a média geral (considerando os quatro isocentros), em módulo, dos erros setup translacionais foi 0,22 ± 0,04 mm, apresentando uma incerteza combinada de 0,28 mm, calculada de acordo com a teoria de propagação de erros. A média geral dos erros residuais translacionais foi 0,14 ± 0,02 mm, apresentando uma incerteza combinada de 0,16 mm. A média geral dos erros setup translacionais para o método frame foi 0,73 ± 0,14 mm, apresentando uma incerteza combinada de 1,15 mm. A média geral dos erros residuais translacionais foi 0,31 ± 0,04 mm, apresentando uma incerteza combinada de 0,63 mm. DISCUSSÃO A RC desempenha um papel importante no tratamento de lesões intracranianas. Para uma localização precisa dos volumes alvos de tratamento, assim como para uma imobilização adequada do paciente, há a necessidade de múltiplos testes referentes às técnicas que serão adotadas. A verificação diária e rigorosa dos sistemas de tratamento e o uso correto dos aparatos necessários para esses procedimentos contribuem para um resultado mais efetivo(5,6). A literatura vigente tem mostrado grandes avanços terapêuticos quando utilizados sistemas IGRT. Com relação às RCs, o método frameless evita os eventuais desconfortos do frame e, adicionalmente, possibilita o fracionamento do tratamento.(3,5,7-14) Nossos resultados revelam uma vantagem significativa na verificação submilimétrica da posição do alvo durante o tratamento por meio da aplicação de imagens de raios X. A possibilidade de realinhamento do paciente na etapa que antecede cada irradiação traz mais segurança para tratamentos que administram doses altas, como as RCs. De acordo com Lamba et al.(3), as eventuais fontes de erros durante uma RC frame incluem movimentações inadequadas do arco estereotáxico, desalinhamento de lasers que compõem o sistema, incoerências nos colimadores e isocentros, sejam eles do próprio equipamento ou do volume alvo, e/ou variações na mesa de tratamento. Estes componentes podem permitir movimentações sutis no sistema de montagem e, consequentemente, pequenos desvios translacionais finais. Ainda assim, o método frame é considerado por muitos pesquisadores o padrão ouro da RC, por sua estabilidade adquirida pela fixação óssea. Como medida comparativa, muitos estudos têm sido publicados enfocando a precisão desses dois métodos(3-5,10,11). O presente estudo foi desenvolvido com o intuito de agregar mais dados sobre os erros de posicionamento setup e residuais da RC frame e RC frameles. Para tanto, foi realizado o teste end-to-end com uso de um objeto simulador antropomórfico ART-210. Verificou-se, por meio do estudo da média dos erros por isocentro, desvio-padrão da amostra e das médias, assim como pelas incertezas combinadas, uma precisão equivalente entre os dois métodos, sem evidências de diferenças estatisticamente significantes. Pôde-se analisar, com este trabalho, a eficiência do sistema ExacTrac no que diz respeito à significativa redução dos erros setup após as devidas correções sugeridas pelo sistema, resultando nos erros residuais. No caso da RC frame, estas correções ficaram mais evidentes, apresentando resultados de até 1 mm de diferença entre o erro setup e o erro residual final. Levando em consideração a magnitude dos erros da RC frame e da RC frameless, os resultados mais elevados observados na RC frame podem ter sido ocasionados por pequenas movimentações do arco estereotáxico após sua fixação no crânio do objeto antropomórfico. Este phantom não apresenta tecido cutâneo, portanto, sua fixação pode ter sido prejudicada quando comparada à de um paciente propriamente dito. Embora o teste end-to-end com objetos simuladores antropomórficos seja amplamente utilizado para atestar a precisão e capacidade técnica desses sistemas, este modelo segue condições idealizadas. A aplicação clínica representa um desafio mais complexo para o uso desses sistemas, possivelmente apresentando resultados mais fidedignos. Ramakrishna et al.(5) obtiveram resultados semelhantes tanto com phantom quanto com pacientes reais, mostrando uma precisão geral do sistema IGRT semelhante à relatada para a RC frame. O movimento intrafração foi maior para a RC frameless, porém, os valores permaneceram dentro de uma gama adequada para o tratamento estereotáxico. Refletindo sobre esses resultados, os autores afirmam que, embora se possa argumentar que o posicionamento guiado por imagem pode ser mais preciso ou com igual precisão ao frame, a maior movimentação intrafração deve ser considerada. Tal estudo mostrou um deslocamento de até 2 mm intrafração em cerca de 22% dos pacientes analisados durante a RC frameless. Como medida preventiva, Ramakrishna et al. sugerem a utilização da RC frame para alvos menores que 5 mm. Nossos resultados para a RC frameless foram mais homogêneos que os encontrados para a RC frame. Porém, analisando as médias de forma geral apresentadas na Figura 6, notam-se valores menores no isocentro 4 e maiores no isocentro 2. Conforme descrito na seção ART-210 e teste hidden target, o isocentro 4 encontra-se na base do crânio do objeto simulador, e o isocentro 2, no lobo frontal. Não há consenso sobre a possibilidade de maior ou menor movimento do alvo dependendo da região em que este se encontra, todavia, hipoteticamente, pode-se inferir que lesões mais frontais merecem maiores cuidados pois estão sujeitas a uma maior movimentação craniana. Alguns autores afirmam que, durante cerca de dois terços do tempo de tratamento, o movimento mais frequente é o na direção longitudinal ou craniocaudal(3), exatamente o movimento que resultou em um valor mais alto para a RC frame (ver Figura 5). Possivelmente, os resultados para a RC frameless tenham sido menores na direção longitudinal pelo fato de o molde basal ter sido posicionado cuidadosamente no apoio craniano alongando-se até o topo do crânio do objeto simulador, aumentando a estabilidade nessa direção. CONCLUSÃO Por meio do estudo das médias, desvios-padrão amostrais e pontuais, e pelas incertezas combinadas, pôde-se avaliar e comparar os erros de posicionamento setup e residuais translacionais 3D de uma RC guiada por imagem, frame e frameless, com uso de um objeto simulador antropomórfico modelo ART-210. Os resultados mostraram não haver evidências de diferença significativa entre os dois métodos de imobilização, sugerindo precisão equivalente. Pôde-se observar, de forma adicional, que o sistema de imagem utilizado apresentou, para esse teste, ótima correção de erros setup, principalmente na RC frameless, resultando em erros residuais próximos a zero. REFERÊNCIAS 1. Asher AL, Burri SH, Wiggins WF, et al. A new treatment paradigm: neoadjuvant radiosurgery before surgical resection of brain metastases with analysis of local tumor recurrence. Int J Radiat Oncol Biol Phys. 2014;88:899-906. 2. Leksell L. Stereotactic radiosurgery. J Neurol Neurosurg Psychiatry. 1983;46:797-803. 3. Lamba M, Breneman JC, Warnick RE. Evaluation of image-guided positioning for frameless intracranial radiosurgery. Int J Radiat Oncol Biol Phys. 2009;74:913-9. 4. Murphy MJ, Chang SD, Gibbs IC, et al. Patterns of patient movement during frameless image-guided radiosurgery. Int J Radiat Oncol Biol Phys. 2003;55:1400-8. 5. Ramakrishna N, Rosca F, Friesen S, et al. A clinical comparison of patient setup and intra-fraction motion using frame-based radio-surgery versus a frameless image-guided radiosurgery system for intracranial lesions. Radiother Oncol. 2010;95:109-15. 6. Brainlab. Manual do usuário clínico. Revisão 1.2. ExacTrac Versão 5.5. Feldkirchen, Alemanha: Brainlab AG; 2014. 7. Hayashi N, Obata Y, Uchiyama Y, et al. Assessment of spatial uncertainties in the radiotherapy process with the Novalis system. Int J Radiat Oncol Biol Phys. 2009;75:549-57. 8. Karam SD, Tai A, Strohl A, et al. Frameless fractionated stereotactic radiosurgery for vestibular schwannomas: a single-institution experience. Front Oncol. 2013;3:121. 9. Lu XQ, Mahadevan A, Mathiowitz G, et al. Frameless angiogrambased stereotactic radiosurgery for treatment of arteriovenous malformations. Int J Radiat Oncol Biol Phys. 2012;84:274-82. 10. Gevaert T, Verellen D, Tournel K, et al. Setup accuracy of the Novalis ExacTrac 6DOF system for frameless radiosurgery. Int J Radiat Oncol Biol Phys. 2012;82:1627-35. 11. Schmidhalter D, Malthaner M, Born EJ, et al. Assessment of patient setup errors in IGRT in combination with a six degrees of freedom couch. Z Med Phys. 2014;24:112-22. 12. Badakhshi H, Barelkowski T, Wust P, et al. Intrafraction variations in linac-based image-guided radiosurgery of intracranial lesions. Cancer Radiother. 2013;17:664-7. 13. Prabhu RS, Dhabaan A, Hall WA, et al. Clinical outcomes for a novel 6 degrees of freedom image guided localization method for frameless radiosurgery for intracranial brain metastases. J Neurooncol. 2013;113:93-9. 14. Takakura T, Mizowaki T, Nakata M, et al. The geometric accuracy of frameless stereotactic radiosurgery using a 6D robotic couch system. Phys Med Biol. 2010;55:1-10. 1. Mestre, Tecnóloga em Radiologia, Doutoranda da Faculdades Pequeno Príncipe, Curitiba, PR, Brasil 2. Médicos Radioterapeutas do Centro de Radioterapia São Sebastião, Florianópolis, SC, Brasil 3. Físico Médico do Centro de Radioterapia São Sebastião, Florianópolis, SC, Brasil 4. Tecnóloga em Radiologia, Dosimetrista do Centro de Radioterapia São Sebastião, Florianópolis, SC, Brasil 5. Tecnóloga em Radiologia, Mestranda da Universidade Tecnológica Federal do Paraná (UTFPR), Curitiba, PR, Brasil 6. Física Médica do Centro de Diagnóstico Médico Imagem, Florianópolis, SC, Brasil 7. Doutor, Professor do Departamento de Física da Universidade Tecnológica Federal do Paraná (UTFPR), Curitiba, PR, Brasil Endereço para correspondência: Taynná Vernalha Rocha Almeida Rua Vereador Antonio dos Reis Cavalheiro, 670, ap. 32, Cabral Curitiba, PR, Brasil, 80035-210 E-mail: taynnavra@gmail.com Recebido para publicação em 7/4/2015. Aceito, após revisão, em 29/5/2015. Trabalho realizado no Centro de Radioterapia São Sebastião, Florianópolis, SC, Brasil. |
|
Av. Paulista, 37 - 7° andar - Conj. 71 - CEP 01311-902 - São Paulo - SP - Brazil - Phone: (11) 3372-4544 - Fax: (11) 3372-4554